車輛中心不僅將WinBus自駕技術研發成果成功技轉給國內廠商,協助建立創新技術,並促成1.6億的台美合作自駕投資案,與美國電動商用車廠OPTIMAL集團合資成立優車智能股份有限公司。同時也將帶領自駕小巴WinBus及智慧電動巴士的自駕生態供應鏈夥伴,共同拓展美國電動巴士及自駕車市場。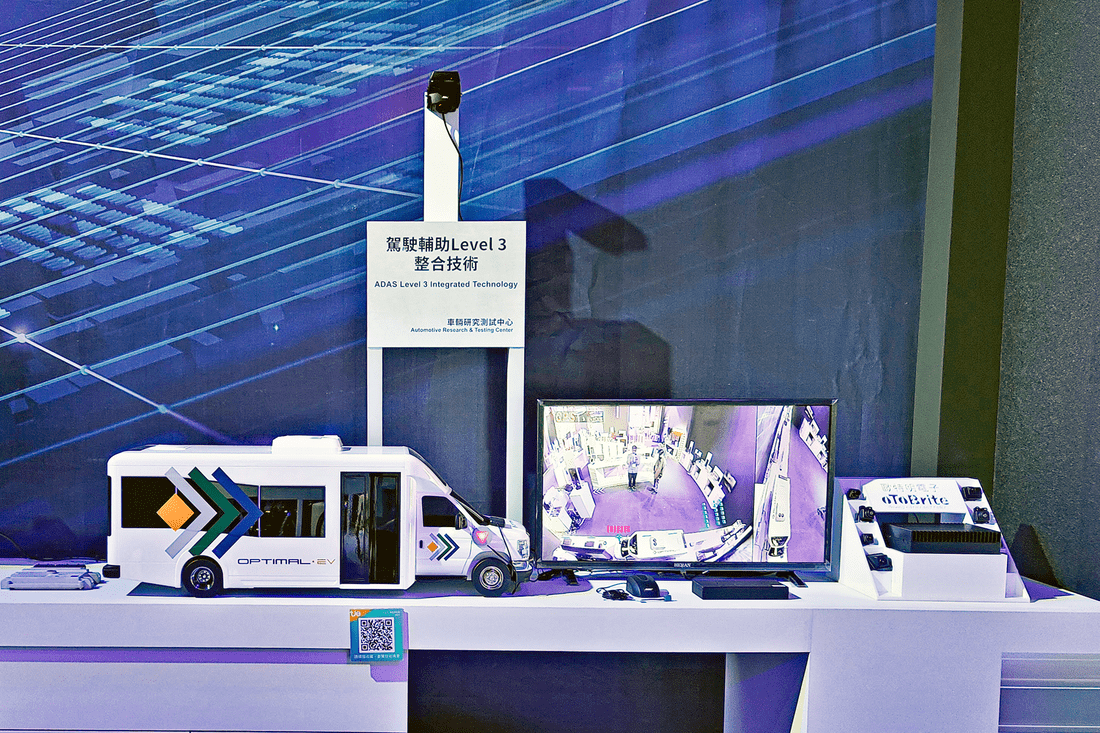
五大自駕技術創新突破 技轉廠商助力升級 駕駛輔助Level 3邁入商品化
車輛中心與產業夥伴合作開發的第一台MIT自駕電動小型巴士WinBus,自2019年發表後,先後與彰化縣、桃園市及高雄市政府合作,提供觀光接駁及活動體驗服務,歷經了6,000多公里實際道路的運輸接駁與自駕運行能力驗證,在感測、定位、網聯、決策與測試驗證等五大技術取得創新突破:
1. 感知融合辨識技術:融入AI技術提供高精度辨識多元類別,從貓、狗小型動物、行人到大客車及聯結車都可成功感測與辨識。
2. 整合智慧路側號誌與通訊機制(ITS+CV2X):透過串聯彰化縣府ITS計畫,建置智慧路口C-V2X,取得17處紅綠燈號誌及方向燈指示訊息(SAEJ2375),補強紅綠燈影像辨識正確率。
3. 複合式定位與安全防護技術:開發結合圖資定位(SLAM)、衛星基站(RTK)及IMU複合式定位與電子圍籬安全防護機制,能夠在空曠(偏鄉)及結合工業區(多車、多人、多臨停)的密集建築區精準定位與安全防護,此項技術更榮獲2021年IEEE最佳研討會論文獎(IEEE BEST CONFERENCE PAPER AWARD)。
4. 優化自駕決策技術:整合車道跟隨系統(LFS)、車道維持系統(LKS)、自動緊急煞車系統(AEB)、主動車距巡航控制技術(ACC)等決策技術,並透過WinBus在國內自駕運行實驗,開發適合國內路況之自駕決策,精進自駕技術。
5. 自駕車虛實模擬驗證技術:(1)完備自駕路線模擬驗證場景,調查交通情況建構車流模型,建立自駕車輛與感測器模型,讓自駕車在上路前能經過完整模擬驗證。(2)結合國際標準及國內交通特色,完成15類基本功能之58項測試情境修訂,融合低速自駕車標準ISO 22737及台灣道路常見特有情境。
此外,在產業合作上也取得豐碩成果,除了透過技術合作與技轉,協助合作廠商建立創新技術,補足台灣技術缺口;協助廠商投入科專計畫,累積技轉收入超過6千萬元。更獲得美國電動商用車廠OPTIMAL-EV認可,合資成立優車智能股份有限公司,投資金額達1.6億元,將於10月下旬揭牌正式營運。
WinBus成果現身美國華府台灣形象展 攜手自駕產業生態鏈夥伴拓展美國市場
「駕駛輔助Level 3整合技術」的優異成果今年也將於10月12至14日在美國華盛頓舉辦的「台灣形象展」同步展出,經濟部部長王美花、國貿局江文若局長、工業局陳佩利副局長及車輛中心總經理王正健,偕同技嘉科技、英業達、橙的電子、友通資訊、台達電等WinBus產業價值鏈夥伴,以及歐特明電子、科飛數位、義隆電子、奇美車電及為升電裝等優車智能Level 3駕駛輔助電動車供應鏈夥伴,在美國向客戶首度展出ADAS及自駕系統解決方案,攜手拓展美國電動車及自駕車市場。